NEWS
2023-05-19
リリース
ロボットスタートアップのキビテク、NEDO委託事業におけるレザバーコンピューティング技術 の実証実験および事業化推進として参画
株式会社キビテク(代表取締役:林摩梨花、吉海智晃、以下キビテク)は、国立研究開発法人 新エネルギー・産業技術総合開発機構(NEDO)が実施する「高効率・高速処理を可能とするAIチップ・次世代コンピューティングの技術開発」の事業者である九州工業大学からの委託を受け、機械学習の効率化、高速化に資すると期待されるレザバーコンピューティング の開発に関し、 玉川大学、大阪大学、九州工業大学などと協力して実証実験および事業化を推進することになりました。
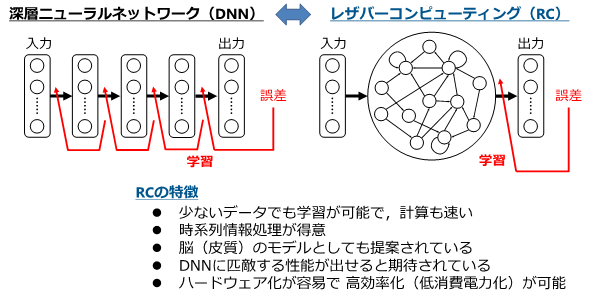
レザバーコンピューティングとは、ランダムな再帰結合を有するニューラルネットワークを利用するAI技術であり、その簡単な構造にもかかわらず、深層学習ネットワークに比肩し得る優れた性能が期待される技術です(下図参照)。
NEDO事業では、レザバーコンピューティングを動物の脳を模した脳型コンピューティング技術の一つとして定めて研究開発を推進しています。産業機械やサービスロボット等、エッジ領域において今後一層複雑かつ高度な動作を要求される端末にレザバーコンピューティング技術を実装することで、ロボットによるリアルタイムでの状況認識や、イレギュラーな事象の予測や対処など、複雑な情報処理タスクの実行を可能とし、従来は安全性の観点などから最低限必要となっていた人とロボットの間にある距離を埋め、新たなサービスの創出に寄与する次世代の産業基盤技術の創出を目指します。
■キビテクの役割
キビテクは自社製品である、ロボット遠隔制御サービスHATS(Highly Autonomous Teleoperation Service)に、本事業での成果(ソフトハンド,レザバー計算技術)を実装し、事業化を行います。
具体的には、エラー発生時、遠隔オペレータ作業のアノテーションをつけてデータ収集を行い、学習させることでタスクの失敗リスクを予測する。また、エラー停止時だけでなく通常の自律動作実行中にもタスクパフォーマンスを予測し、基準値を下回った場合に遠隔オペレータとのマッチングを行う機能や動的なパラメータ調整による回避機能など。これらにより、HATSを搭載したロボットの飛躍的なパフォーマンス向上が見込めます。
研究開発内容紹介サイト
NEDO関連サイト https://www.nedo.go.jp/activities/ZZJP_100123.html ※
研究開発グループサイト https://www.brain.kyutech.ac.jp/morie/