受託事業
様々なロボットを作れる技術を持っています
創業以来、知能ロボットをはじめとした多種類のロボットとその周辺機器連携システムの開発を行ってきました。そして現在、遠隔制御サービスとそのシステムインテグレーションサービスを提供しています。その経験を通して培った技術のコアとなるのは、バランス感と繋げる力です。
バランス感のあるグランドデザインを描く力

私たちは、その来歴から、①幅広い機器・システムの概略知識があり、②全自動にこだわらずに適度に人に頼ることで、実効性の高いシステムを作ることに情熱を持ったエンジニア集団として成長してきました。
機器やシステムを繋げる力

人型ロボット、ペット型ロボット、FA機器、物流用システム、ドローン、自動運転、IoT機器等の、機構・回路・制御ソフトウェアに亘り開発してきました。下記のような技術要素を繋げることができます。
クラウドシステム、ロボットの目・耳・口・手・脚、FA・LA機器、WMS・FMS、モバイルアプリ、人工知能(AI)
開発実績の一部をご紹介
病院内での医薬品搬送ロボットの開発支援
(3D LiDARを用いた人物追跡・軌道予測技術の研究開発)
病院という複雑な環境下で利用することを目的として、屋内環境における3D LiDARを用いた人物追跡と軌道予測技術の研究開発を行いました。本研究開発では、特定の環境下において、遠距離にいる人物を検出し、その動きを追跡・予測するための技術を開発しました。


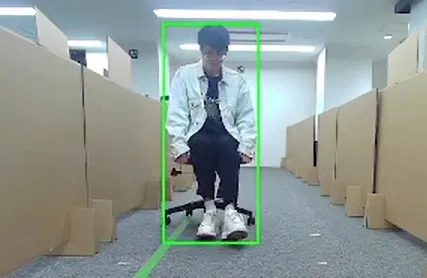
(左図)病院内での搬送ロボットの外観
(中央および右図)画像処理機能の実験のため、中腰や、座ったまま位置を変える動きをする人物を当社が再現し、処理結果を表示した画像
自律移動ロボットのカスタマイズ開発および実環境における群制御の実証試験
協調制御AIおよびHATSとの連携に対応した自律移動ロボットとAIカメラをカスタマイズ開発。
工場内を模した実環境において、ロボットを2つのグループに分けて搬送作業を実施。先行グループの1台に搭載されたAIカメラが障害物を検知し、その情報を後続グループと共有。後続ロボットが自律的に経路を再設定して回避行動を取る一連の動作に成功し、状況適応型の協調制御の有効性を確認。
さらに、異常停止に対するHATSによる遠隔介入・復旧操作も実施し、自律制御と人による介入が両立可能であることを実証
サービスロボットとその複数台連携機能、シナリオの編集機能、クラウド上システムとの連携機能の開発
約1年で研究用プラットフォームとしてのサービスロボット群一式のゼロベースでの開発と、利用方法のレクチャの実施。
制御用回路基板、機構設計などからスタートし、地図やシナリオや異常状態を管理するクラウド上システムも視野に入れた設計とロボット制御ソフトの開発を行った。前記のクラウド上システムや動作のデザインも他社と連携して開発。
腕を持ち移動するサービスロボットのマニピュレーション機能開発
モバイルマニピュレータでのテーブル上の拭き掃除機能の開発。
清掃するべき領域の認識、テーブルの汚れの検知、清掃用マニピュレーションおよび自律移動軌道計画プログラム、清掃動作管理プログラム一式の開発。








