










しんぼり りょういち
プロジェクトマネージャー
Web系のエンジニア職を探していたときにたまたまキビテクの求人を見つけました。
そのときは、Webのフロントエンドエンジニアの求人とAIエンジニアの求人がどちらも興味ありましたが、まずはフロントエンドエンジニアの募集のほうに応募して、のちのちAI関係の業務にも関われるといいかなというくらいの感じでした。
実際面談してみるとフロントエンジニアというよりも、もっとWeb系全般やロボット関連などもっと幅広い範囲での活躍を期待されてると感じ、自分のスキルの幅を広げるいいチャンスにもなると思い入社を決めました。
良い点は、組織がフラットであるというところです。他の会社だとこの上司は苦手だなぁとか思うこともあったりしますが、キビテクは組織がフラットなこともあり、そもそも上司とかという感じではなく学生時代のサークルに近い感覚で全員と話せるところです。
成長途中だなと思うのは、自社製品開発や受託の範囲を広げたりして社員の数は増えてきているけれど、それに対して例えばメンタリングであったりとか、社内制度の整備といった点に関してはまだまだ成長の余地があると感じます。
Web開発に関してはフルスタックでやらしてもらっているので、現在はフロントエンド、バックエンド、インフラとすべての領域に関わっています。幅広い知識は必要ですがその分やりがいもあって、すべて一人で新たなシステムを立ち上げるだけの力量も確実につくので、楽しみながら業務を行っています。
Webのエンジニアに限らず、ロボットエンジニアでも同様ですが、自分のスキルを広げる努力であったり、自分の経験のない領域であっても臆せず取り組んでいくことは必要ですし、また、自分が組織の中で出来ることは何かということをよく考え行動に移していけるのが必要な人材と思います。

みやた なおき
プロジェクトマネージャー
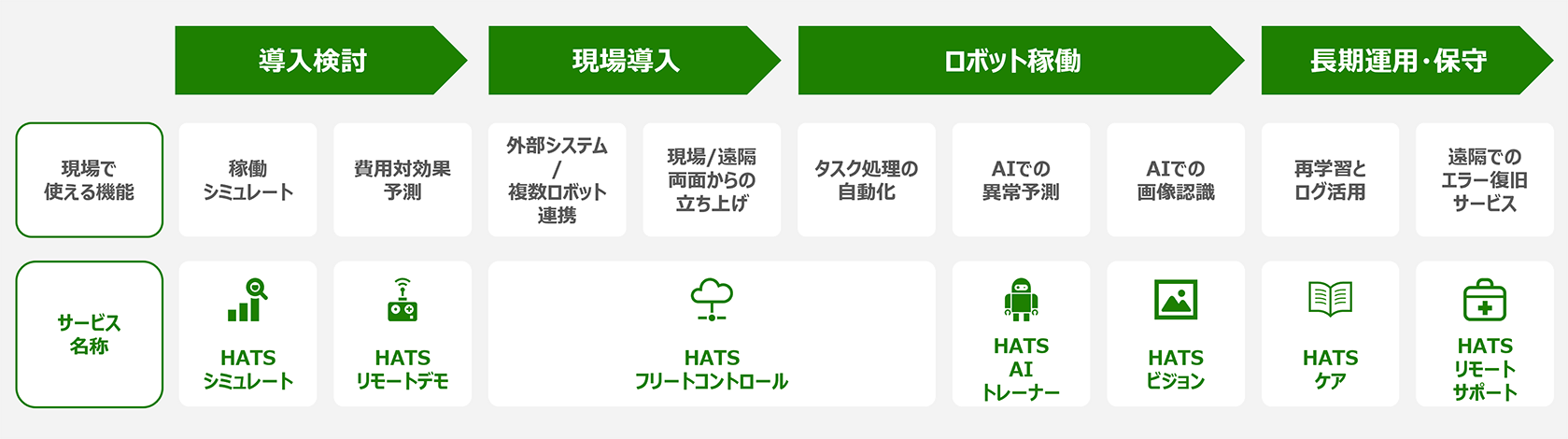
前職で定年近くまで勤めた後、セカンドキャリアとして転職を考えていた時に、偶然キビテクという会社を知り興味を持ちました。理由は、元々プログラミングが好きで、ロボットという先端分野の仕事ができること、さらにWebサイトの社員の方々の写真で、自分より年配の方々も結構いらっしゃるのを見て、ここなら自分の年齢でも活き活きと働くことができそうと思ったことです。もちろん、HATSが、自律ロボット導入障壁を下げ、今後成長が期待できると考えたことも大きな理由の1つです。
某求人情報サイトで、たまたまキビテクという会社を知りました。ロボット開発経験が採用条件となっており、自分には経験がありませんでした。ただ、年齢が60近い自分でも、ロボットという先端分野で活き活きと働けそうな会社と感じたので、諦めず、1ヶ月くらいROSを集中的に勉強してから応募しました。前職でのロボット以外の業務経験もあって採用いただけたと思っています。
ロボットという先端分野のソフトウェア開発に携わることができると思ったからです。
ロボット開発経験はありませんでしたが、デバイスドライバ等、ハードウェアを制御するようなプログラムを開発するのが好きでした。プログラミングの結果が、モノの動きとして見える部分はロボットにも通じると思っています。
良いところは、様々な分野の技術を持った優秀な方がたくさんいて、その技術をお互いに共有しながら開発を行っているところです。まだ受託開発が中心で、自社サービス HATSが立ち上がり始めた段階ですが、これから成長していくところを直接自分の肌で感じられる点は、他では得難い経験になると思っています。
お客様の漠然としたゴールはあっても、具体的な要件が確定していない中、お客様と対話しながら、お客様のゴールを実現すべく、キビテクの持つ技術を活用して具体化していく方法を考えるところですね。逆にプレッシャーでもあるわけですが(笑)
現在のHATSは、ロボットの自律動作が滞留した時に人が遠隔でカバーするサービスですが、将来は、ロボットに限らず、まだ完璧とは言えない様々な分野のAIを人がカバーできるような汎用的なサービスにできれば、と思っています。
ロボットに関する技術を持っていることはもちろん必要ですが、自律ロボットは様々な分野の技術を集結した結晶なので、それ以上に、新しい技術をどんどん吸収していく意欲を持った方が必要と思います。さらに、ゴールを目指すために、何をすべきかを自分で考えて行動できる人がいいですね。

フィリップ・ジェニングス
エンジニア
工学の色々な分野に好奇心を持って、機械や回路の設計から制御理論や画像処理まで、幅広い領域の知識を必要とするロボット業界に興味を持ちました。キビテクに興味をもったきっかけは、様々なロボットの受託開発に加え、自社サービスのHATSも色々な用途のロボットに導入したいというところに関心をもって、長年働いても新しいことに挑戦できてやりがいを感じられる会社だと思ったからです。
仕事の内容に自社サービスの開発も受託開発もあるので作業内容のバリエーションが多くて、入社までの経験を活かしながらも新しい知識を身につけて成長できると思ったからです。
学生時代はロボットの経路計画やコンピュータビジョンの勉強や制御系の研究に加えて、何人かのチームで問題定義とロボットの設計からシミュレーターや実機での結合テストとデモまで、全体的なロボット開発のプロジェクトもありました。 大学の夏休みにイギリスの中小企業でインターンシップをして、ROSでセンサーフュージョンを活用して、放射性物質の位置を突き止めて地図やカメラ画像で可視化するロボットや携帯型機器の開発に参加していました。
キビテクのいいところは仕事の領域が広くて異なる専門の人と協力しながら成長する機会が多く、国籍や年齢にもかかわらず色々な人がいるのでたくさん学び合えるところです。
成長途中のところは、技術の知識や経験が深い人が多いことに対し、管理経験がある人が少なく、自立して作業したり知識を身につけたりすることに自信がない人は慣れにくいかもしれません。
最近は自分の専門領域以外のタスクに手を付けて、その領域に詳しい人から新しいことを学ぶことができた一方、新入社員に自分の詳しい領域について教えることもできてやりがいを感じています。
普段は作業を分担してタスクを終わらせてから確認しあいますが、タスクによって専門領域が違う人と協力したり、詳しい人とまだ詳しくない人が共同作業で知識伝達したりすることもあります。
皆の入社までの経緯が異なりますから、皆で助け合って、いつでも分からないことを心配なく聞くことができて働きやすい環境になっています。英語と日本語のレベルも人それぞれで、複雑な内容を英語か簡単な日本語で説明したりして、日本語に自信がない人にとっても働きやすいと思います。
キビテクに入社するまでROSやロボットの経験がなかった社員が多くて、応募する時の知識よりロボットに対しての熱意と、技術の色々な分野への好奇心の方が大事だと思います。ロボットに強い関心を持って新しいことに挑戦するのが好きな方はぜひ応募してください。

さとう けんじ
プロジェクトマネージャー
ロボットに興味を持ったきっかけは、たしか当時ASIMOなど人型ロボットのブームがあって、ロボットがやれる学科に進学しました。
ゼミや学部の卒業研究でJSKという研究室に入って、それからロボットの仕事しかしていません。
キビテクに興味をもったのは、CEOの林さんとCTOの吉海さんが同じ研究室出身なので、創業当時から知っていて、面白いと思っていました。
学生時代は、遺伝的アルゴリズムを用いたロボットの動作最適化、低融点金属を用いた変形ロボット、人型ロボットによる紐の認識と操作、介助ロボット(HSR.トヨタ)が家具を操作するシステムなどの研究をしていました。介助ロボットのときからROSを使っています。
前職では、家庭用ロボットや家族型ロボットの開発をやっていました。
キビテクの良いところは、いろんなロボットを経験できることです。
ロボットしかやらないけど、ロボットならなんでもやるという感じで、あらゆる形態のロボット、システムのあらゆるレイヤー、あらゆるステージの開発が経験できます。
今はスクラムマスターもいて、複数のスクラムが走っています。
名ばかりではないスクラムができていると思います。
成長途中のところは、女性エンジニアが採用できるようになってきましたね。まだ1割以下ですけど。
チームごとに喋る言語や開発のスタイルが違うので、マッチするチームに入ればやりやすいと思います。
私のチームは日本語/英語混在で喋っていて、開発はリモートのモブプロ・ペアプロでやっています。
私が間違っていたらちゃんと反論してくれることです。おかげで私も日々成長できます。
ロボットの経験があるといいですね。ロボットの研究で修士・博士を取っているとか、ロボコンに出ていたとか、業務でロボットを開発したとか。
審査で提出するコードは、そのコードをチームで開発しているという想定をして、他のメンバーがそのコードの続きを書きやすい状態になっているとか、メンテナンスしやすい状態になっているとか、そういうことができていると評価高いと思います。
海外進出。
成長し続けられる人。

林まりか
代表取締役CEO
心の幸せを増やしたいという想いは創業時から持っていましたが、直接的なきっかけは子供を出産したことです。子供と同じ目で世界を見て、不条理さを感じることが増えた結果、不幸な境遇にある未来の世代の方々の助けになることに、自分を捧げたいと思うようになりました。ロボット技術で、既に豊かな地域の便利さを高めるだけでなく、経済面や健康面等で困難を抱える方にとっての就労機会や交流機会を増やすことをしたいです。
まずは言語や地域や身体等によらない就業機会を増やしたいです。並列に複数の企業やコミュニティに所属する機会を増やしたいです。そして、狭いコミュニティのためだけに行動するのではなく、地球規模の目線を持って行動する人が過半数であるような未来を作りたいです。それには言語の壁を超える技術、遠隔就労の技術、多様な方との交流の技術や交流のインセンティブの仕組みが必要で、これらに貢献したいと考えています。
達成感を共有する仲間がいる場所というだけではなく、あとから振り返って、人への愛の気持ちを持つ機会が多い仕事を選んだなと思える場所にしたいです。

前原 賢一
取締役COO
ロボティクスの技術で人類を豊かにする。
Webの進化で社会は大きく変化しました。一方でリアルの現場の進化は一定程度にとどまっていると感じます。キビテクはロボットの社会実装を大きく進めるため、Web×ロボットの遠隔制御技術を世界に普及させます。特に日本において、人口減少、高齢化またリモートワークの必要性が増す中、そのような社会課題の解決にも資する技術と感じています。
ロボティクスやWebの力で世界を変えたいという人達が誇りをもって働ける。
新しいものを世界に出すことができる組織。
そのような目的とビジョンを共有できる人には、会社として可能な限り、自由に働いてもらいたいと思っています。それこそがキビテクの強みであり、今後、もっと強化して行きます。
自分の技術やスキルで世界を変えたい、人の役に立ったり、喜んでもらいたいと思っている方。また、世界にないプロダクトの開発に挑戦したい方、メンバーと競い合いかつ助け合える方。スタートアップというハードな挑戦が必要な場ですが、ご自身のかけがえのない人生を最高に輝かせることができる現場だと思っています。お待ちしています!!

吉海 智晃
代表取締役CTO
当社代表の林をリーダーとして採択された、2010年度IPA未踏IT人材発掘・育成事業(吉海も外部アドバイザとしてプロジェクト参加)で人と人の触れ合いを可視化するデバイスの開発を行い、それが評価されたことがきっかけで、人が中心にいる技術をきちんと社会に出し、問いかけていくことをしたいと考えたのが理由になります。
私自身アカデミア出身ということもあり、どんな時でもチャレンジ精神を忘れずに自由闊達な議論をフラットに行える場であってほしいと思っています。新卒で入ったエンジニアから業界数十年のベテランエンジニア、役員にいたるまで、ワンチームとして一緒に良いものを作るべく知恵を出し合う、そんな場所を目指しています。
ロボティクスの領域はまだまだ発展途上の領域です。AIやエネルギーなど周辺領域の発展とともに個別のニッチな課題解決のための手段から、より汎用的な課題解決が可能な手段へと進化していくと考えています。そのような流れの中で、周辺領域に目を配ること、そして、個々のフレームワークやライブラリの使い方に習熟するのではなく、その背景にある技術的な原理がどうなっているかを身につけることが重要になると考えています。

上田泰士
執行役員CPO
キビテク社の良い点は、社員の年齢も国籍も多種多様でありながら、皆が気軽に話し合えるフラットな関係性を築けている点です。 一人ひとりが得意な分野に存分に貢献しつつ、他者からも効果的に技術や経験を学ぶことができる環境がキビテクにはあります。一方で、最近急に人数が増えたこともあり、様々な制度やコミュニケーションの場の構築など、急ピッチで進めています。
マネジメントの際は、誰もが発言しやすい環境を作ることを心がけています。急激に新しいメンバーが増えてくると、お互い能力を探り合い、知らないことを恥じて質問を控えたりしがちです。しかし、効率的で失敗の少ない開発のためには、それぞれの知識と経験を総動員することが不可欠です。そこで、ミーティングの場では1人1回発言する機会を作り、外国籍エンジニアには率先して英語で話しかけるように努めています。
HATSが提供する価値は、メンテナンスフリーで、手軽なロボットサービスです。ロボットの設定や、不具合時の復帰作業などは、遠隔地のオペレータがやってくれるので、ユーザーにとっては、ロボットが面倒な設定も不具合もあたかも自動的に解決されたかのように動作します。また、将来的にはオペレータは全世界で24時間体制でスタンバイし、時差を利用してオペレータにも無理の生じないサポート体制を構築することができます。

假屋 秀和様
課長
昨今、ロジスティクスの量・正確さ・迅速さがますます求められている中、ピッキングをはじめとする作業効率の改善は喫緊の課題。
課題感は数年前からあり、様々な検討を重ねてきた経緯がある。しかし、なかなか現場に合うものがなく導入が進まなかった。ピッキングの大半を占める時間、歩行の部分を現場のベースを大きく変える事なく実現出来る可能性が見えた事。
単にAMRの販売ではなく、常に遠隔サポート(HATS)がついていることが決め手となった。物流の現場は業務を止めることが出来ず、異常があった際に即復旧が求められる。そのサポートを常に受けられることが良いと思った。
当社では『止まらない物流』をテーマにしている事もあり、その点もマッチした。
また、他の設備でもそうだが、現場の人がマニュアルを読み込まないといざという時に使えないが、そこも遠隔オペレータがアテンドしてくれるところが魅力だった。
倉庫内の搬送業務をロボットが行ってくれることで効率化の効果が出ている。人や台車が行きかう現場なので、時にロボットが停止/滞留してしまうことがあるが、HATSで復旧し、もとの動きに戻ってくれている。その復旧を全て現場の人間で行うとやはり大変だったが、HATSがあると助かる。このような遠隔サポートにより、これまでの設備とは管理する側の負担が大幅減となっている。
安全面で人がぶつからない減速/停止距離の調整。走行ルートの明示。これらにより、安全を担保しながら現場で動いている。次工程への荷渡し方法の簡素化、負担減ロボットの最大活用のための作業担当者の運用ルール、判断基準、この当りの工夫で人とロボットの融合で最大効果を狙っている。
初めはロボットの動きに戸惑いもあったが、数日間一緒に仕事をすると動きに慣れ、今では違和感なく現場に溶け込み、ロボットと共にある現場が当たり前の風景となっている。